





海底管道走管稳定性分析
本计算模块用于计算在特定参数条件下的走管位移。
海底管道在位稳定性分析
求解管道最小自重(DNV-based)
浅基础承载力VHM包络面
圆形坡型基础的弯剪和竖向承载力
拖曳锚
拖曳锚的安装深度和承载力计算,以及安装过程模拟计算
吸力桶
吸力桶的安装和竖向承载力计算
浅基础竖向承载力
条形或圆形坡型基础在地基土不排水情况下的竖向承载力计算
本团队致力于计算海洋岩土力学方面的研究,主要研究领域包括:海上风电基础,深水锚泊系统,海洋管电缆系统在位稳定性,海洋结构延寿加固及退役回收技术,海上大型人工岛建设技术等。
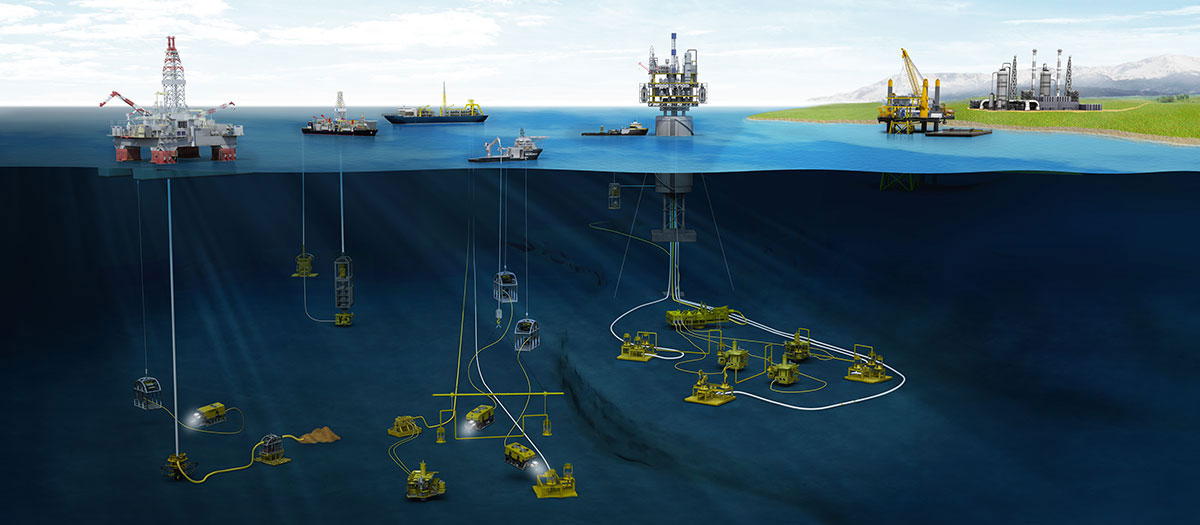
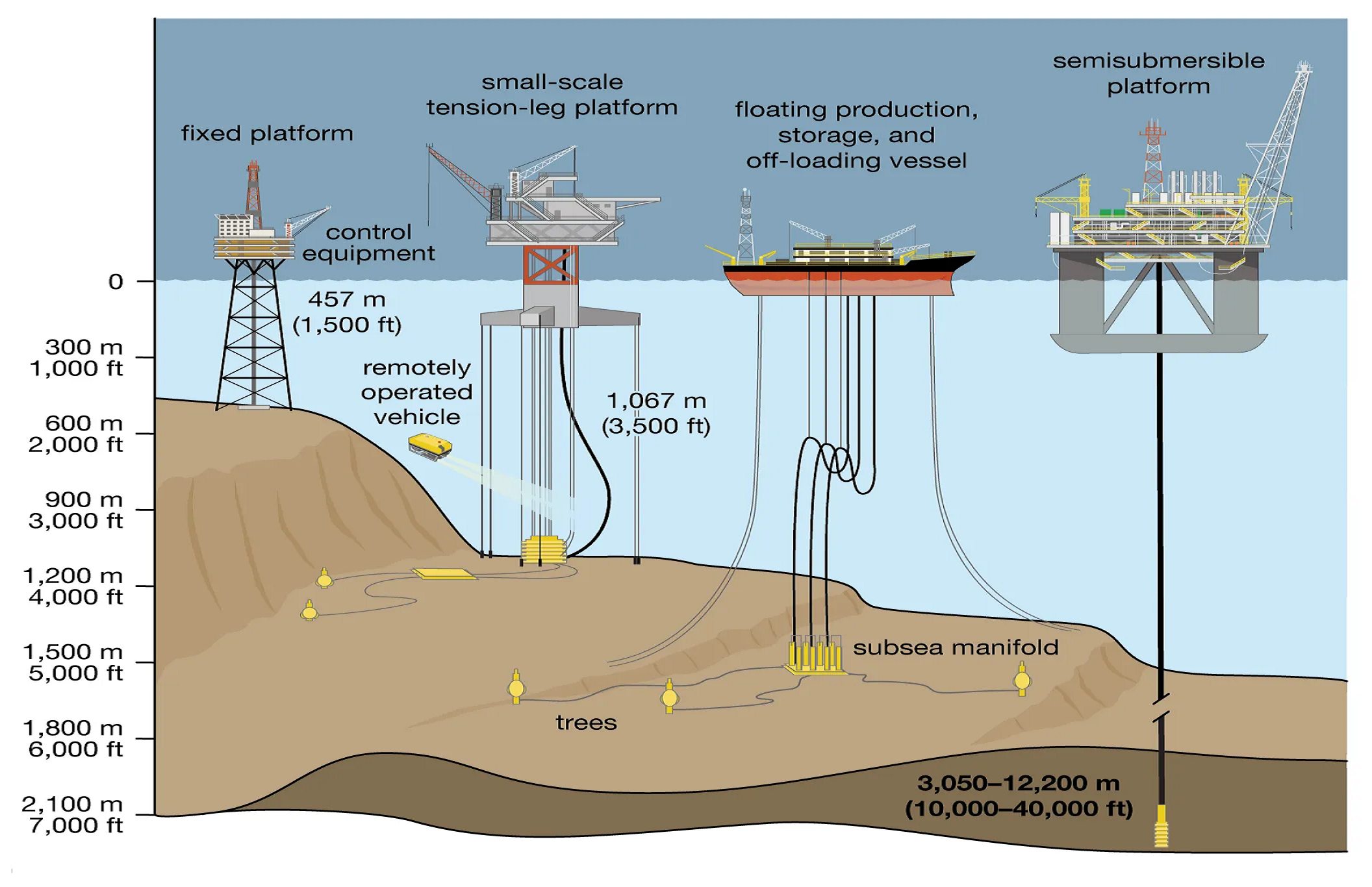
海底管道系统研究
海底管道系统研究是海洋工程领域的一个重要分支,它关注于油气资源的高效、安全运输。这一研究涵盖多个关键方面,其中走管稳定性、在位稳定性以及管道撞击是确保管道长期安全运行的核心议题。
海底管道在高温高压作用下会发生轴向走管,严重威胁海洋油气管道工程安全,课题组为了探究在海底管道轴向走管失稳的机理,进行了理论研究、试验研究和数值模拟;通过理论推导得到了管道轴向走管的解析解,通过试验研究获取了理论公式中的各个参数,并通过数值模拟验证了理论公式的可靠性。结合三方面的研究,提出了管道设计的改进措施,且不断进行深入研究,以突破现存的管道走管的技术难题。
海底管道长期承受来自海洋环境动载荷(如洋流和波浪等)和内部高温高压流体压力的共同,容易发生局部的失稳和屈曲,即在位稳定性问题。这与管道与周围海床土壤之间的摩擦特性、土壤各种指标、可管道自身的特性以及洋流特点等有高度相关性,为此课题组进行大量试验和数值计算,结合理论推导取得了一系列的成果。
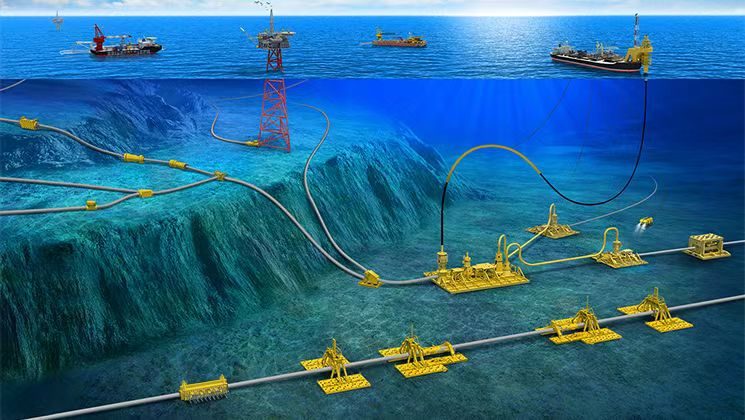
深海锚泊系统研究
深海油气开发需要首先建设深海锚泊系统,锚泊系统由上部漂浮的工作平台和下部的锚泊系统组成,其中锚和锚链是主要组成部分。本课题组通过理论分析和试验研究,结合数值分析,对锚的安装过程和承载力和影响因素做了一系列研究,并对比分析了各种锚的效果,开发了新型的锚,来简化安装的难度,提高锚的承载力。同时,还对锚链的工作原理进行了分析,研究了锚链的形态和承载力的关系,研究了锚链和土的相互作用等。
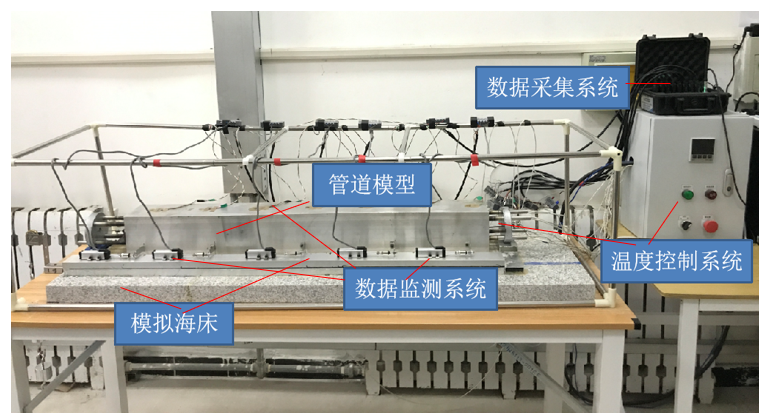
海底管道走管模型试验系统
仿生鱼鳞管道走管模型试验装置为自制,试验装置长160cm,宽60cm,高80cm,主要由海床模拟系统、管道温控系统、数据监测及采集系统构成
管道温控系统由4根电加热管和温度控制柜构成,电加热管均匀分布安装于管道模型内部,电加热管与管道模型内壁距离2cm。电加热管两端由管道两侧的端部固定块支撑固定,端部固定块为实心碳钢,厚度20mm,开设4个通孔使电加热管穿过。电加热管接高温导线与温度控制柜温度输出端口连接,端部固定块通过自身厚度放置于花岗岩基底表面,温度传感器通过端部支撑板测温孔延伸至管道模型内部,通过高温导线将温度数据传输至温度控制柜,电加热管及温度传感器布置。电加热管总长1260mm,1100mm为加热工作长度,两端各80mm非加热长度。加热工作长度略大于管道模型长,可有效防止管道模型端部散热较快而造成的管道温度分布不均。加热管工作电压为220V,加热功率为每支1500W。温度控制柜由数据操作显示屏、系统状态显示灯和操控按钮组成,加热温度最高可达500℃,加热方式为空气加热。
海底管道走管数值模拟
根据试验获得参数,结合理论推导,建立了海底管道走管模型,并进行了数值模拟,模拟结果与实际走管数据比较,验证了模型的准确性。

板锚上拔透明图试验
为观测和分析安装中拖曳锚在土中的运动特性,自制了由玻璃水槽、拖曳系统和拉力传感器组成的板锚拖曳试验装置。将硅凝胶与水混合制备成了透明土,依据有效重度强度比确定模型锚材料,按照 1:50 缩尺比例,在自制板锚拖曳试验装置上开展固定锚腚拖曳锚拖曳试验,研究了偏心系数和锚腚角对固定锚腚拖曳锚运动特性的影响规律。结果表明:该试验装置可以直接观测拖曳板锚嵌入土中运动的全过程;锚眼法向偏心距和切向偏心距不是独立参数,偏心系数能综合描述锚眼偏心对板锚在土中运动的影响;锚腚角是影响板锚在土中运动的重要参数,随着锚腚角增加,板锚最终嵌土深度先增加后减小; 随着锚眼偏心系数增加, 板锚最终嵌土深度先增加后减小; 固定锚腚拖曳锚在土中的运动轨迹近似服从负指数函数曲线。